A Pennsylvaniai és a Michigani Egyetem kutatói megalkották a világ legkisebb, teljesen programozható, autonóm robotjait: mikroszkopikus úszógépeket, amelyek képesek önállóan érzékelni és reagálni a környezetükre, hónapokig működnek, és darabonként mindössze egy fillérbe kerülnek.
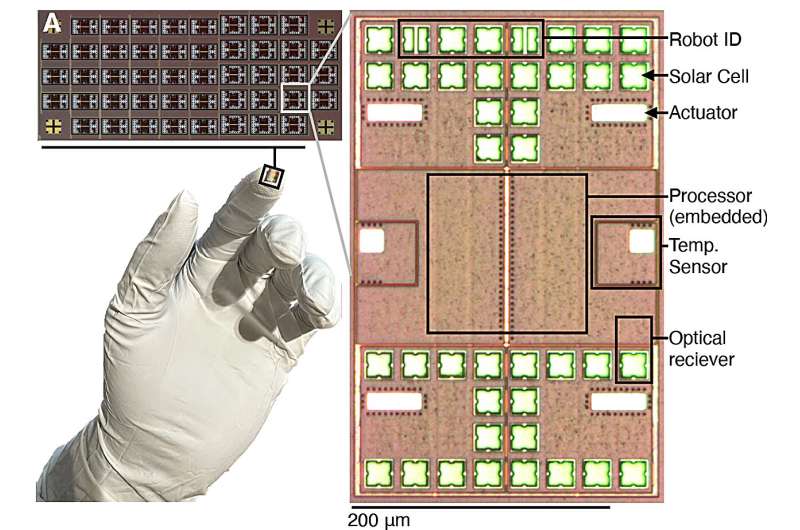
Szabad szemmel alig láthatók, mindegyik robot körülbelül 200 x 300 x 50 mikrométer méretű, ami kisebb, mint egy sószem. Számos biológiai mikroorganizmus méretében működve a robotok az egyes sejtek egészségének megfigyelésével elősegíthetik az orvostudomány fejlődését , a gyártást pedig a mikroszkopikus eszközök építésének elősegítésével.

A fénnyel működő robotok mikroszkopikus számítógépeket hordoznak, és programozhatók komplex minták szerinti mozgásra, a helyi hőmérsékletek érzékelésére és ennek megfelelően a pályájuk módosítására.
A Science Robotics and Proceedings of the National Academy of Sciences folyóiratban leírt robotok kötél, mágneses mező vagy joystick-szerű külső vezérlés nélkül működnek, így ezek az első valóban autonóm, programozható robotok ebben a méretarányban.
„Tízezerszer kisebb autonóm robotokat készítettünk” – mondja Marc Miskin, a Penn Engineering villamosmérnöki és rendszermérnöki adjunktusa és a tanulmányok vezető szerzője. „Ez teljesen új léptéket nyit a programozható robotok előtt.”
A milliméter alatti határ áttörése
Évtizedek óta az elektronika egyre kisebb és kisebb lett, de a robotok nehezen tudták tartani a lépést. „Hihetetlenül nehéz olyan robotokat építeni, amelyek egy milliméter alatti méretben önállóan működnek” – mondja Miskin. „A terület lényegében 40 éve ragadt ennél a problémánál.”
Az emberi világot uraló erők, mint például a gravitáció és a tehetetlenség, a térfogattól függenek. Ha azonban lecsökkentjük őket egy sejt méretére, akkor a felülethez kötött erők, mint például a közegellenállás és a viszkozitás veszik át az irányítást. „Ha elég kicsi vagy, a vízben haladni olyan, mint nagyban a kátrányban haladni” – mondja Miskin.
Más szóval, mikroszkopikus szinten a nagyobb robotokat, például végtagokat mozgató stratégiák ritkán sikeresek. „A nagyon apró lábakat és karokat könnyű eltörni” – mondja Miskin. „Megépíteni is nagyon nehéz őket.”
A csapatnak tehát egy teljesen új meghajtási rendszert kellett terveznie, amely a mikroszkopikus birodalomban zajló egyedi mozgásfizikával összhangban – és nem pedig ellene – működött.
Úszásra késztetni a robotokat
A nagy vízi élőlények, mint például a halak, a maguk mögött hagyott víz nyomásával mozognak. Newton harmadik törvényének köszönhetően a víz egyenlő erejű, ellentétes irányú erőt fejt ki a halakra, ami előrehajtja azokat.
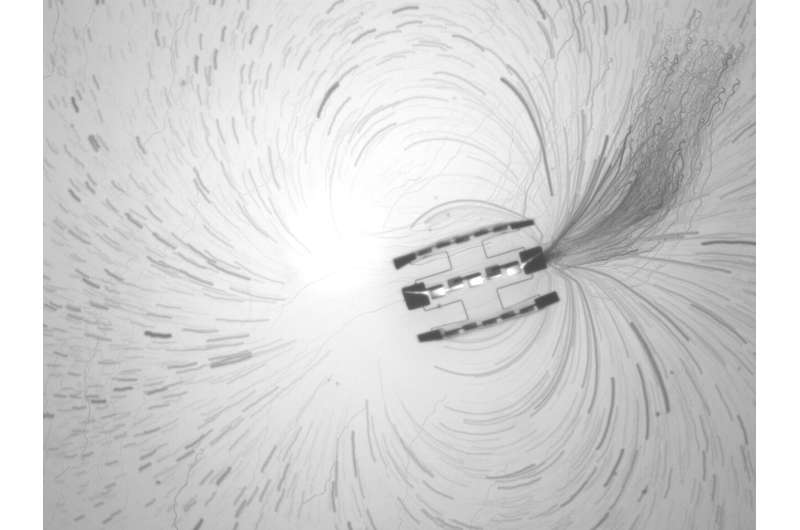
Az új robotok ezzel szemben egyáltalán nem hajlítják meg a testüket. Ehelyett egy elektromos mezőt generálnak, amely ionokat lök a környező oldatban. Ezek az ionok viszont a közeli vízmolekulákra hatnak, animálva a vizet a robot teste körül.
„Olyan, mintha a robot egy mozgó folyóban lenne” – mondja Miskin –, „de a robot okozza a folyó mozgását is.”
A robotok képesek beállítani a hatást kiváltó elektromos mezőt, így összetett mintákat követve, sőt, összehangolt csoportokban is képesek mozogni, hasonlóan egy halrajhoz, akár egy testhossz/másodperc sebességgel.
És mivel a mezőt létrehozó elektródáknak nincsenek mozgó alkatrészeik, a robotok rendkívül tartósak. „Ezeket a robotokat mikropipetta segítségével ismételten át lehet vinni egyik mintáról a másikra anélkül, hogy károsodnának” – mondja Miskin. Egy LED fényével feltöltve a robotok hónapokig képesek úszni.
Agyat adni a robotoknak
Ahhoz, hogy egy robot valóban autonóm legyen, számítógépre van szüksége a döntéshozatalhoz, elektronikára a környezet érzékeléséhez és a meghajtás vezérléséhez, valamint apró napelemekre az energiaellátáshoz, és mindezt egy milliméter töredéke méretű chipre kell elférnie. Itt lépett a képbe David Blaauw csapata a Michigani Egyetemen.
Blaauw laboratóriuma tartja a világ legkisebb számítógépének rekordját. Amikor Miskin és Blaauw először találkoztak a Védelmi Fejlett Kutatási Projektek Ügynöksége (DARPA) által szervezett bemutatón öt évvel ezelőtt, a páros azonnal rájött, hogy technológiáik tökéletesen illeszkednek egymáshoz.
„Láttuk, hogy a Penn Engineering meghajtási rendszere és a mi apró elektronikus számítógépeink egyszerűen egymásnak teremtettek” – mondja Blaauw. Ennek ellenére mindkét félnek öt év kemény munkájába telt, mire leszállították az első működő robotjukat.
Az elektronika legnagyobb kihívása” – mondja Blaauw – „az, hogy a napelemek aprók és mindössze 75 nanowatt energiát termelnek. Ez több mint 100 000-szer kevesebb energiát fogyaszt, mint amennyit egy okosóra fogyaszt.”
Ahhoz, hogy a robot számítógépét ilyen kis energiával is működtetni tudják, a michigani csapat speciális áramköröket fejlesztett ki, amelyek rendkívül alacsony feszültségen működnek, és több mint ezerszeresére csökkentik a számítógép energiafogyasztását.
A napelemek továbbra is a roboton lévő hely nagy részét foglalják el. Ezért a második kihívás az volt, hogy a processzort és a memóriát úgy zsúfolják be, hogy a megmaradt kevés helyre egy programot lehessen tárolni.
„Teljesen újra kellett gondolnunk a számítógépes program utasításait” – mondja Blaauw –, „és egyetlen speciális utasításba kellett sűríteni azt, ami hagyományosan számos utasítást igényelt a meghajtás vezérléséhez, hogy a program hosszát a robot apró memóriájába zsugorítsuk.”
Robotok, amelyek érzékelnek, emlékeznek és reagálnak
Ezek az újítások tették lehetővé az első olyan szubmilliméteres robot létrehozását, amely valóban képes gondolkodni. A kutatók tudomása szerint korábban senki sem helyezett el igazi számítógépet – processzort, memóriát és érzékelőket – egy ilyen kicsi robotban. Ez az áttörés teszi ezeket az eszközöket az első mikroszkopikus robotokká, amelyek képesek érzékelni és önállóan cselekedni.
A robotok elektronikus érzékelőkkel rendelkeznek, amelyek Celsius-fok harmadának megfelelő pontossággal képesek érzékelni a hőmérsékletet. Ez lehetővé teszi a robotok számára, hogy a növekvő hőmérsékletű területek felé haladjanak, vagy jelentsék a hőmérsékletet – a sejtek aktivitásának előrejelzőjét –, lehetővé téve számukra az egyes sejtek egészségének monitorozását.
„A hőmérsékletméréseik jelentéséhez egy speciális számítógépes utasítást terveztünk, amely egy értéket, például a mért hőmérsékletet, kódol a robot által előadott kis tánc rezgéseiben” – mondja Blaauw. „Ezután egy mikroszkópon keresztül, kamerával vizsgáljuk ezt a táncot, és a rezgésekből dekódoljuk, mit mondanak nekünk a robotok. Ez nagyon hasonlít ahhoz, ahogyan a méhek kommunikálnak egymással.”
A robotokat fényimpulzusokkal programozzák, amelyek egyben energiával is látják el őket. Minden robotnak egyedi címe van, amely lehetővé teszi a kutatók számára, hogy különböző programokat töltsenek be mindegyik robotra. „Ez számos lehetőséget nyit meg” – teszi hozzá Blaauw –, „mivel minden robot potenciálisan más szerepet tölthet be egy nagyobb, közös feladatban.”
Csak a kezdet
A robotok jövőbeli verziói összetettebb programokat tárolhatnak, gyorsabban mozoghatnak, új érzékelőket integrálhatnak, vagy kihívást jelentőbb környezetben is működhetnek. Lényegében a jelenlegi kialakítás egy általános platform: meghajtási rendszere zökkenőmentesen működik az elektronikával, áramkörei olcsón, nagy léptékben is gyárthatók, és a kialakítása lehetővé teszi új képességek hozzáadását.
„Ez igazából csak az első fejezet” – mondja Miskin. „Megmutattuk, hogy egy agyat, egy érzékelőt és egy motort bele lehet tenni valamibe, ami szinte túl kicsi ahhoz, hogy látsszon, és az hónapokig fennmaradhat és működhet. Ha megvannak ezek az alapok, akkor mindenféle intelligenciát és funkcionalitást rá lehet rétegezni. Ez egy teljesen új jövő kapuját nyitja meg a robotika számára mikroszkopikus szinten.”
Tovább a cikkre: techxplore.com (Gaby CLark) és science.org és pnas.org