A tapintható áttörés lehetővé teszi a robotok számára, hogy felismerjék az írott számjegyeket, és intuitív, érintésalapú parancsokkal hajtsanak végre feladatokat.
Akutatók olyan módszert fejlesztettek ki, amellyel a robotok veleszületett tapintásérzetet adnak azáltal, hogy belső erő-nyomaték érzékelőiket gépi tanulási algoritmusokkal integrálják.
A német Deutschen Zentrums für Luft- und Raumfahrt (DLR) csapata által kifejlesztett módszer lehetővé teszi a robotok számára, hogy érzékeljék és értelmezzék az emberi érintést anélkül, hogy költséges szintetikus biomimetikus bőrre vagy extra érzékelőkre lenne szükségük a felületük lefedésére.
A csapat nagy felbontású belső érzékelőket és mély tanulást használt annak érdekében, hogy a robotkar teljes testét érintse, és pontosan érzékelje az erő részleteit.
„Az ebben a munkában javasolt belső tapintásérzék alapjául szolgálhat a fizikai ember-robot interakció egy olyan fejlett kategóriájához, amely még nem volt lehetséges, lehetővé téve az elmozdulást a hagyományos modalitásoktól az alkalmazkodóképesség, a rugalmasság és az intuitív kezelés felé” – mondta. a kutatók közleményében .
Ember-robot interakció
A modern robotrendszerek képességei gyorsan fejlődnek, így ígéretes együttműködőkké válnak különböző területeken, mint például a gyártás, az űrkutatás, az egészségügy és a mindennapi életben való segítségnyújtás.
Az emberi problémamegoldás és érvelés robotikus precizitással történő integrálása aktív kutatási terület, különösen az ember- robot interakció (HRI) területén.
Különféle HRI-módszereket, például látásalapú, hangfelismerési és fizikai kontaktus-megközelítéseket vizsgáltak, de az intuitív fizikai interakció megvalósítása továbbra is kihívást jelent.
A biztonságos és hatékony interakciókhoz elengedhetetlen, hogy a robotok tapintással rendelkezzenek, ami lehetővé teszi a fizikai érintkezések pontos azonosítását. A kutatók szerint a vezérléshez hagyományos erő-nyomaték szenzorokat használnak, de a részletes elérhetőségekhez explicit tapintásérzékelés szükséges.
Bár a tapintható felületek és érzékelők terén előrelépés történt , továbbra is kihívások vannak a lefedettség, a vezetékezés, a robusztusság és a valós idejű képesség terén.
A kutatók szerint a robotokat robusztus, érzékeny érzékelőkkel kell felszerelni , amelyek képesek érzékelni az erőt, hogy fizikailag kölcsönhatásba léphessenek az emberekkel. Ez költségessé és bonyolulttá válhat, ha nagy vagy ívelt robotfelületekkel foglalkozik.
Tapintható áttörés
A DLR Robotikai és Mechatronikai Intézetének (RMC) kutatói integrált érzékelőket használtak a robot beépített tapintási képességekkel való felszereléséhez.
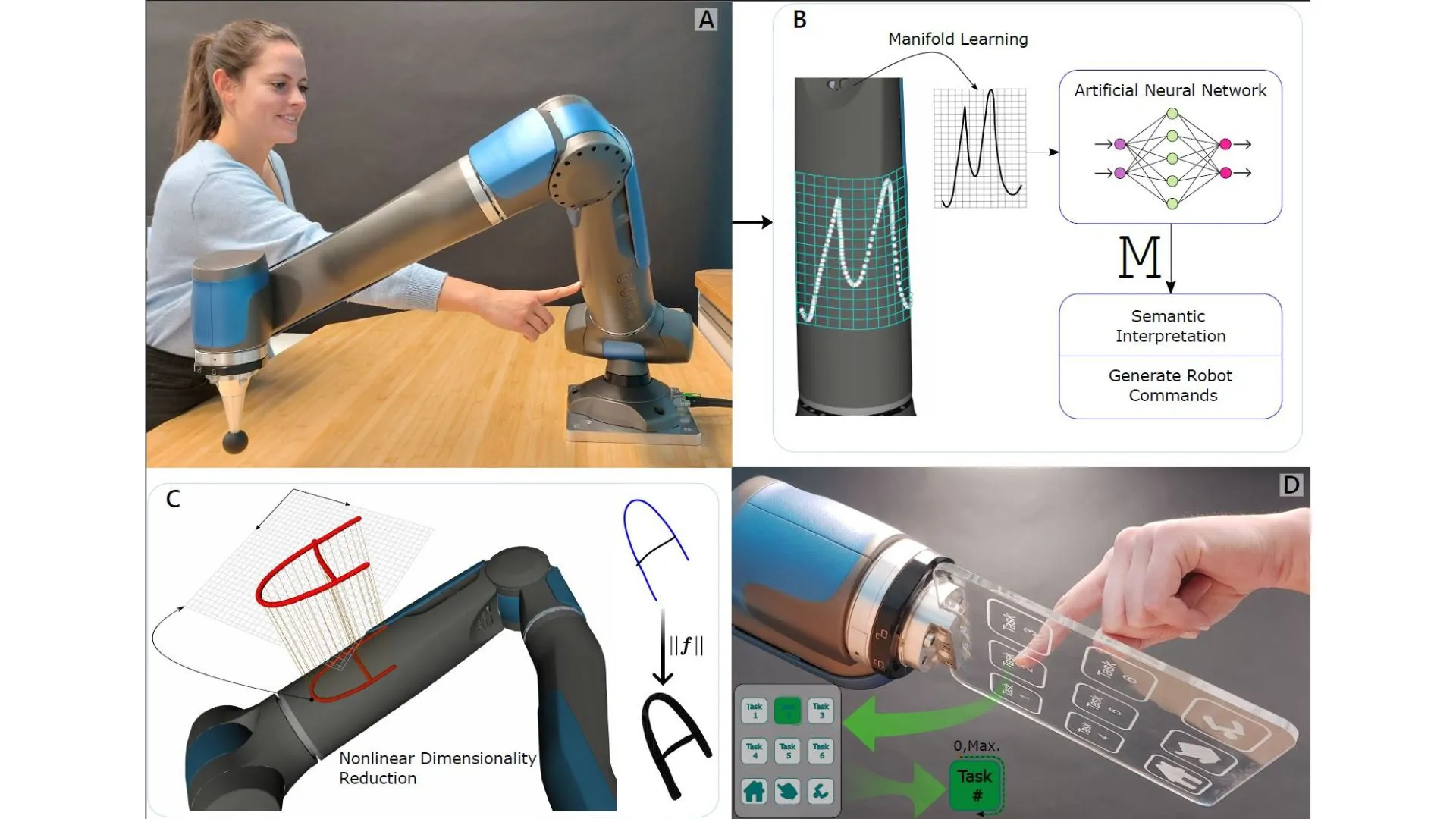
Leküzdik a nehézségeket a Safe Autonomous Robotic Assistant (SARA) rendszerben már szereplő berendezések használatával, egy olyan robotkarral, amelynek ízületeiben és alapjában erő-nyomaték érzékelők találhatók, amelyek érzékelik a helyzetet és a közvetlen mozgást.
Ez lehetővé teszi a robot számára, hogy külső érintésérzékelők nélkül érzékelje és reagáljon a fizikai interakciókra. A szenzorok segítségével a robot érzékelni tudja, hol és milyen sorrendben hatottak a különböző erők a felületére.
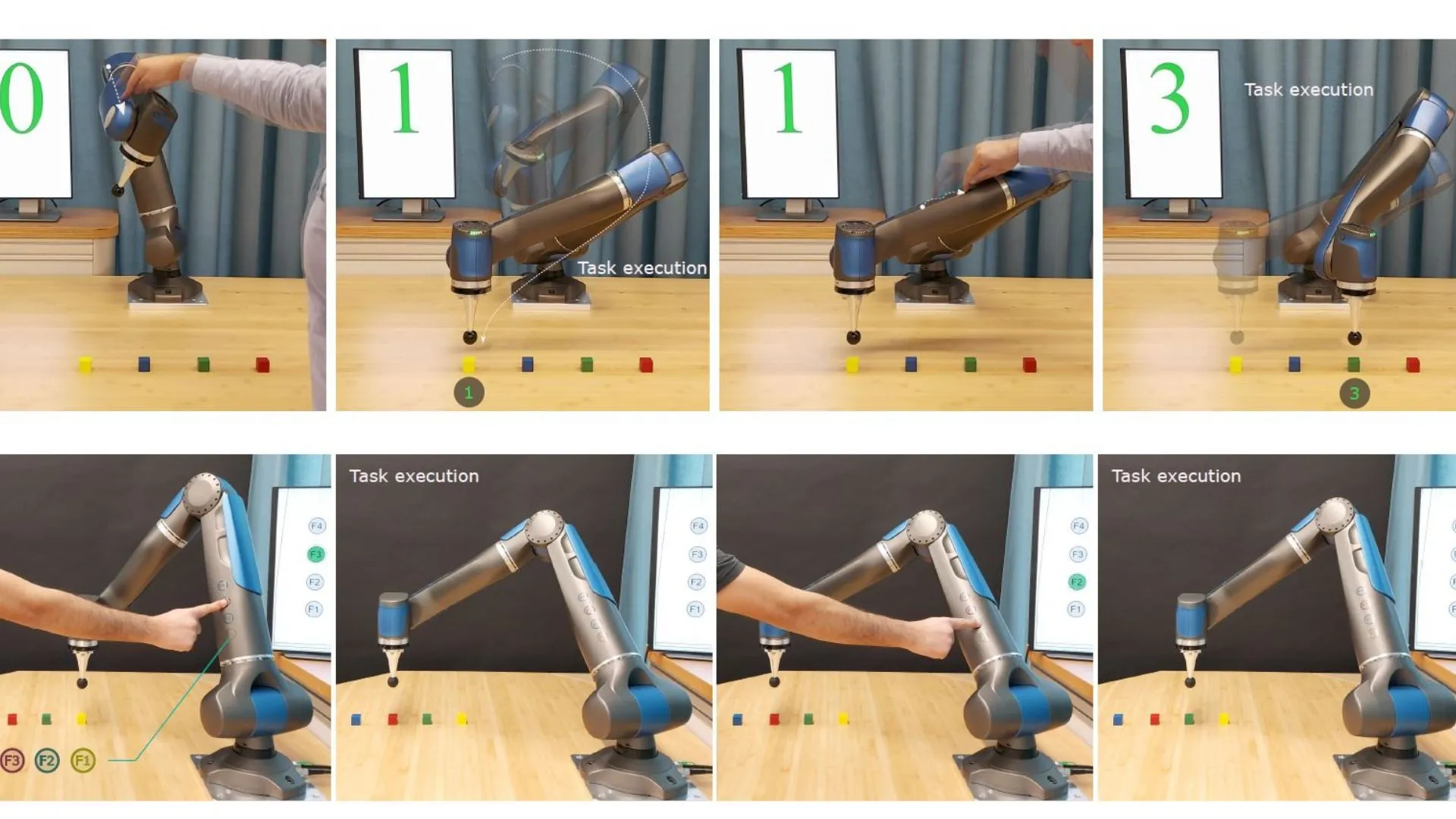
Ezt a képességet mélytanulási algoritmusokkal kombinálták, hogy azután értelmezzék az alkalmazott érintést. Bebizonyították, hogy a robot képes felismerni a felületén nyomott számokat vagy betűket, ha neurális hálózatokat használ az egyes karakterek előrejelzésére.
A csapat ezt a mechanizmust a robot felületén található virtuális „gombokkal” vagy csúszkákkal is kiterjesztette, amelyek segítségével adott parancsokat vagy mozdulatokat indíthat el.
A kutatók azt állítják, hogy a megközelítés intuitív és pontos tapintással ruházza fel a rendszert, és növeli a lehetséges fizikai ember-robot interakciók tartományát.
„Az ebben a munkában javasolt belső tapintásérzék alapjául szolgálhat a fizikai ember-robot interakció egy olyan fejlett kategóriájához, amely még nem volt lehetséges, lehetővé téve az elmozdulást a hagyományos módokról az alkalmazkodóképesség, a rugalmasság és az intuitív kezelés irányába” a csapat a tanulmányban.
Tovább a cikkre: interestingengineering.com