Új robot-sebészeti eszközt fejlesztettek ki. A maga nemében elsőként egy robotkonvojt használtak minimálisan invazív endoszkópos mikrosebészet végrehajtására.
Ezt több milliméter méretű, TrainBots nevű robotokkal érték el.
A Német Rákkutató Központ (DKFZ) kutatói megalkották ezeket az apró orvosi robotokat különféle alkalmazásokhoz, beleértve a gyógyszeradagolást és a sebészeti beavatkozásokat.
„A TrainBots szervmodellben elért ígéretes eredmények után optimisták vagyunk afelől, hogy képesek leszünk miniatűr robotokból álló csapatokat fejleszteni az endoszkópos sebészet további feladataihoz” – mondta Moonkwang Jeong, a cikk első szerzője.
Epevezeték elektromos eljárás
A legtöbb ilyen apró robot gyakran korlátokkal szembesül. A hagyományos miniatűr robotokból hiányzik az erő a kényes műtétekhez szükséges műszerek szállításához. Az erők kombinálásával ezek az apró robotok nagyobb kihívást jelentő feladatokat is meg tudnak oldani.
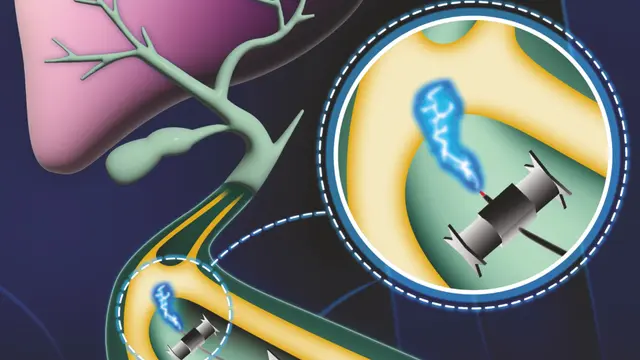
A kutatók három TrainBot egységből álló innovatív robotkonvojt alkalmaztak egy epevezeték sebészeti eljárás „szimulálására”. Az epevezeték egy cső, amely az epét a májból a vékonybélbe szállítja. Az epe a máj által termelt folyadék, amely segít a zsírok lebontásában. Az epevezetékrák gyakran az epevezeték elzáródásához vezet, ami az epe felhalmozódását okozza. Ennek megoldására endoszkópos vizsgálat után meg kell szüntetni az elzáródást. Az endoszkópos eljárások során rugalmas endoszkópot helyeznek az egyén száján keresztül. Ez az eszköz végighalad az emésztőrendszeren, áthalad a gyomron, és belép a vékonybélbe. Ha nem vezeti át óvatosan ezen a keskeny járaton, az endoszkóp elakadhat, vagy kellemetlen érzést okozhat a betegnek.
„Itt mutathatja meg erősségeit a rugalmas robotkonvoj” – mondta Tian Qiu, a projekt vezetője.
A robotkonvoj sebészi hatékonyságát sertésszervekkel bizonyították. A csapat a robotkonvoj segítségével egy drótelektródával ellátott endoszkópos műszert irányított az epevezetéken belüli elektromos szövetabláció végrehajtására. A célhely elérésekor elektromos feszültséget alkalmaztak, amely fokozatosan felszámolta a szöveti elzáródást az elektrokauterizáció néven ismert folyamat révén. Érdekes módon a TrainBot egység egy 25 cm hosszú, saját tömegének három és félszeresét nyomó drótelektródát tudott kihelyezni.
„Ezután például egy másik TrainBot-konvoj katétert hozhat a folyadékelvezetéshez vagy a gyógyszerszállításhoz” – jegyezte meg Jeong.
Könnyen mozog a testen belül
A TrainBotokat gondosan úgy tervezték, hogy eligazodjanak az emberi test bonyolult biológiai struktúrái között. A fejlett csúszásgátló lábakkal felszerelt apró robotegység képes áthaladni a csúszós környezetben, például az emberi testen. A TrainBot vezeték nélkül működik, és minden egységet egy külső forgó mágneses mező vezérel. Érdekes módon a mágneses vezérlés lehetővé teszi, hogy a TrainBots lapos síkban mozogjon, miközben a forgásukat is szabályozza. Ez lehetővé teszi a precíz manőverezést az emberi test szűk terében.
A sajtóközlemény szerint az új TrainBot kialakítás a milliméteres méretarányú miniatűr robotok gyakori mozgási problémájára is megoldást kínál. A robotok mozgásuk során gyakran a kúszásra támaszkodnak. Azonban számos testfelületet nyálka borít, ami elcsúszáshoz és mozdulatlansághoz vezet. Ez további szövődményekhez vezethet az emberi szervezetben, és műtétet igényelhet.
Tovább a cikkre: interestingengineering.com